


ENVI是一款完整的遥感图像处理工具,在测绘行业以及无人机图像处理等行业中广为应用,具有强大的图像信息提取、图像增强、图像计算和统计和三维地图地形分析和动画飞行等功能,能够为用户们带来最佳的处理体验,非常适合专业人士、科学家、研究人员和图像分析人员使用。
ENVI5.3简介
ENVI——完整的遥感图像处理平台ENVI(The Environment for Visualizing Images)是美国Exelis Visual Information Solutions公司的旗舰产品。它是由遥感领域的科学家采用交互式数据语言IDL(Interactive Data Language)开发的一套功能强大的遥感图像处理软件。是快速、便捷、准确地从影像中提取信息的首屈一指的软件解决方案。广泛应用于科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防&安全、地球科学、公用设施管理、遥感工程、水利、海洋、测绘勘察和城市与区域规划等领域。
ENVI5.3软件特色
1、传感器和数据格式
ENVI5.3新增如下传感器和数据格式
Pleiades&SPOT tiLED NITF
Deimos-2
DubaiSat-2
SkySat-1/2新的Google数据产品("image Frames"&"Geo Imagery")
Sentinel-2A (哨兵2A)MSI Level 1C
OGC GeoPackage (GPKG)矢量的输入
ENVI5.3支持Mac OS X Yosemite、Windows 10操作系统,支持与ArcGIS 10.3一体化集成。 ENVI5.3支持OGC WCS服务访问和查询数据。
2、图像处理和界面改进
(1)改进头文件编辑器
升级了之前编辑头文件(Edit Header)的功能,更加方便增加、修改和删除图像文件元数据信息。
(2)改进的时空分析工具
可自定义像元大小,可按照栅格数据的获取时间绘制出一个像元的时间剖面曲线。
(3)分类后小斑块处理工具
全新的小斑块处理工具对分类后的结果进行小斑块处理,可自动预览结果。
(4)光谱指数工具的改进
新增两个光谱指数——归一化淤泥指数(Normalized Difference Mud Index ——NDMI),用来突出显示淤泥/浅水像元;改进的归一化水体指数(Modified Normalized Difference Water Index——MNDWI)增强开阔水域特征,来抑制建筑,植被和土壤的影响;
优化了光谱指数工具,根据输入数据的波长情况只显示可计算出的光谱指数
(5)QUAC大气校正算法改进
快速大气校正算法有所改进,提高了校正的精度
应用mud filtering剔除高度结构化的材料;
对于大多数传感器,基于可用波段的一小部分选择端元;当传感器跨可见光和近红外短波红外谱范围,该算法不包括波段中的可见区域;
当波长低于 650 毫微米,将会约束增益曲线为常数;
抑制茂密的植被的影响;
对于高光谱传感器水分吸收波段(940 to 1020 nm),移除云端>元;
可使用掩膜文件,并支持NoData值、NaN值、无穷大/小值的输入设置
(6)Geospatial PDF改进
可以将整个视图的图层输出为Geospatial PDF文件。
(7)图像分类文件的编辑
在显示图像分类文件的图层上,右键选择Edit Class Names and Colors,可以修改分类名称和颜色。
(8)曲线平滑
在ENVI曲线窗口中新增曲线平滑功能,可以平滑波谱曲线、时间序列曲线等。
(9)空间子区与掩膜功能
在文件选择对话框中,可以根据栅格文件、矢量文件、ROI、地理坐标等确定空间子区。也可以选择掩膜文件。
(10)支持GMTED2010 DEM数据的下载
最新的GMTED2010全球高程数据,分辨率是7.5秒
(11)处理性能提升
可批量处理多景数据
多时相、多波段数据显示性能有显著提升
CADRG读写速率和输出质量提升
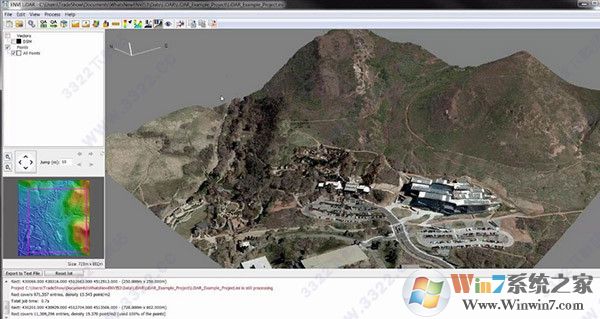
3、FX集成激光雷达处理功能
ENVI FX面向对象信息提取工具集成了ENVI LiDAR模块,可进行3D点云特征提取,该模块实现了2D+3D的一体化,ENVI 的点云可视化和分析工具可以:
File&Open... 或通过拖拽文件的方式打开点云数据
生成地表DEM和DSM
生成正射影像
生成等高线和地形TIN
可视域分析
4、ENVI摄影测量模块
原先的正射校正扩展模块改名为摄影测量模块,新增从立体像对中提取3D信息的功能,从星载数据中获取点云数据降低了成本,可用现有的大量的商业卫星数据,对机载LiDAR覆盖不到的区域生成点云数据,可高性能的处理得到高精度的点云数据,并可利用ENVI的点云可视化、分析和产品生产功能。
可从卫星传感器EO/IR平台立体像对中经过像元校正提取3D点云信息。
用(SGM)算法做密集影像匹配
传感器定位元数据用来约束沿极限维度的搜索
每一个像素都会对应生成一个三维点形成点云
输出强度或RGB文件的编码的LAS文件用于匹配
传感器支持:
带有RPC模型的ENVI标准格式数据
WorldView-1/2/3
GeoEye-1 in DigitalGlobe (.til) and PVL formats
IKONOS
Pleiades-1&SPOT-6/7
QuickBird
下面是从不同的传感器数据中得到的点云数据结果
5、二次开发
新增54个ENVITask接口、13个对象&方法、12个Lidar相关ENVITask/对象&方法,以及9个处理状态信息的对象&方法。
安装破解教程
1、下载软件安装包,点击“IDL_ENVI53SP1win64.exe“开始安装。在接下来弹出的是否拥有管理员页面时,选择“是”,
2、软件正在进行解压,准备安装

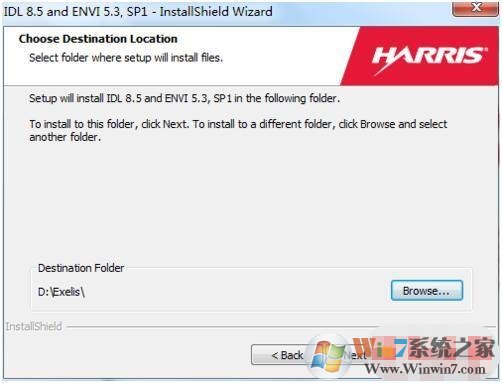
3、在接下来的页面中,点击“Next”,然后弹出的页面中选择“同意条款”,紧接着弹出的页面中选择安装路径。
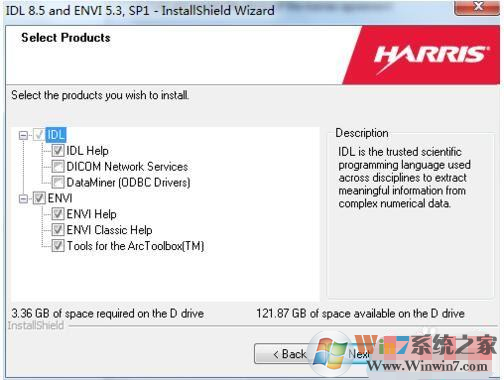
4、上一步点击Next之后,弹出安装产品的选择页面,默认就好,接下来就是ENVI安装了。
5、软件安装完成之后会弹出许可安装的界面,选择“是”。

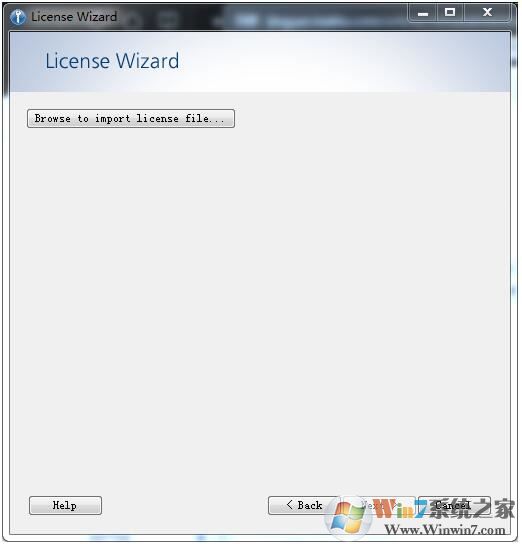
6、在接下来弹出的页面中选择第三项,然后点击“Next”,进行下一步。
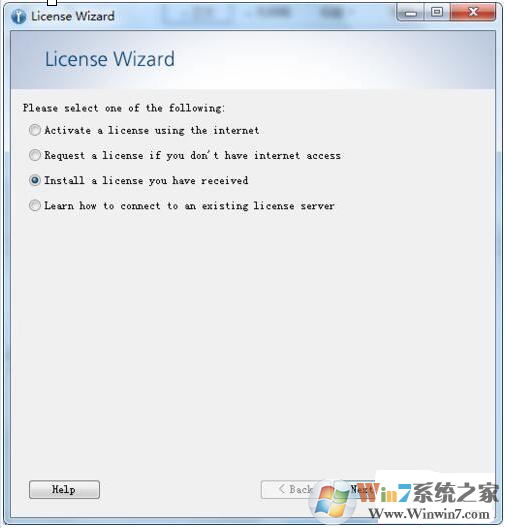
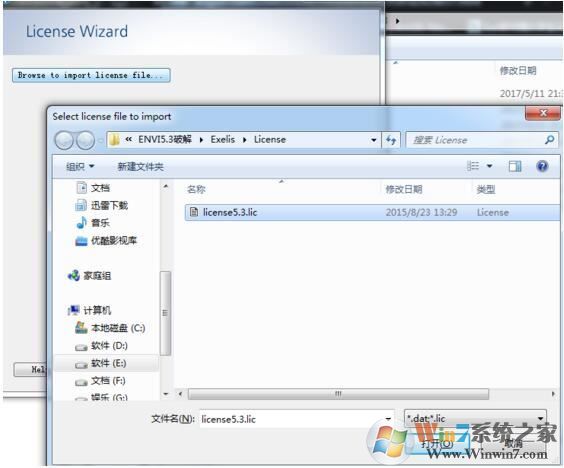
7、再点击“Browse...”导入破解文件中的许可文件“license5.3.lic”,成功配置许可后点击“Finish”。

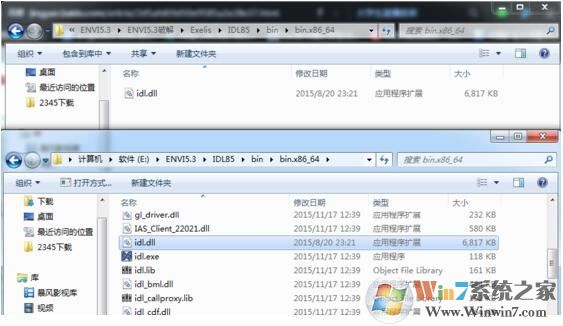
8、最后进行软件的破解,我们将破解文件里的“IDL85”下的“idl.dll”文件复制到安装目录下的相同文件夹下就可以了。
 360解压缩软件2023
360解压缩软件2023 看图王2345下载|2345看图王电脑版 v10.9官方免费版
看图王2345下载|2345看图王电脑版 v10.9官方免费版 WPS Office 2019免费办公软件
WPS Office 2019免费办公软件 QQ浏览器2023 v11.5绿色版精简版(去广告纯净版)
QQ浏览器2023 v11.5绿色版精简版(去广告纯净版) 下载酷我音乐盒2023
下载酷我音乐盒2023 酷狗音乐播放器|酷狗音乐下载安装 V2023官方版
酷狗音乐播放器|酷狗音乐下载安装 V2023官方版 360驱动大师离线版|360驱动大师网卡版官方下载 v2023
360驱动大师离线版|360驱动大师网卡版官方下载 v2023 【360极速浏览器】 360浏览器极速版(360急速浏览器) V2023正式版
【360极速浏览器】 360浏览器极速版(360急速浏览器) V2023正式版 【360浏览器】360安全浏览器下载 官方免费版2023 v14.1.1012.0
【360浏览器】360安全浏览器下载 官方免费版2023 v14.1.1012.0 【优酷下载】优酷播放器_优酷客户端 2019官方最新版
【优酷下载】优酷播放器_优酷客户端 2019官方最新版 腾讯视频播放器2023官方版
腾讯视频播放器2023官方版 【下载爱奇艺播放器】爱奇艺视频播放器电脑版 2022官方版
【下载爱奇艺播放器】爱奇艺视频播放器电脑版 2022官方版 2345加速浏览器(安全版) V10.27.0官方最新版
2345加速浏览器(安全版) V10.27.0官方最新版 【QQ电脑管家】腾讯电脑管家官方最新版 2024
【QQ电脑管家】腾讯电脑管家官方最新版 2024 360安全卫士下载【360卫士官方最新版】2023_v14.0
360安全卫士下载【360卫士官方最新版】2023_v14.0